
חוקרים פיתחו בקר משופר בינה מלאכותית לשלדים חיצוניים שלומד לתמוך בתנועות שונות כגון הליכה וריצה ללא כיול פרטני. מערכת זו מפחיתה משמעותית את הוצאות האנרגיה, מה שהופך אותה לכלי מבטיח לשיפור הניידות האנושית ביעילות.
בקר בינה מלאכותית חדש לשלדים חיצוניים, המסוגל ללמוד תנועות אנושיות שונות ללא תכנות ספציפי, הוכיח חיסכון משמעותי באנרגיה, מסמן צעד גדול קדימה בטכנולוגיית רובוט לביש.
דמיינו לעצמכם תנועות בטוחות ויעילות יותר עבור עובדי מפעל ואסטרונאוטים, כמו גם ניידות משופרת עבור אנשים עם מוגבלות. זה יכול להפוך יום אחד למציאות רווחת יותר, הודות למחקר חדש שפורסם ב-12 ביוני בכתב העת טֶבַע.
מכונות "שלדים חיצוניים", מסגרות רובוטיות לבישות לגוף האדם מבטיחות תנועה קלה יותר, אך מכשולים טכנולוגיים הגבילו את היישום הרחב יותר שלהם, הסביר ד"ר שוזן לואו מאוניברסיטת Embry-Riddle Aeronautical University – המחבר הראשון של הספר טֶבַע נייר, עם המחבר המקביל ד"ר האו סו מ אוניברסיטת צפון קרולינה סטייט (מדינת NC) ועמיתים אחרים.
עד כה, יש לתכנת מראש שלדים חיצוניים עבור פעילויות ויחידים ספציפיים, בהתבסס על מבחנים ארוכים, יקרים ועתירי עבודה עם נבדקים אנושיים, ציין לואו.
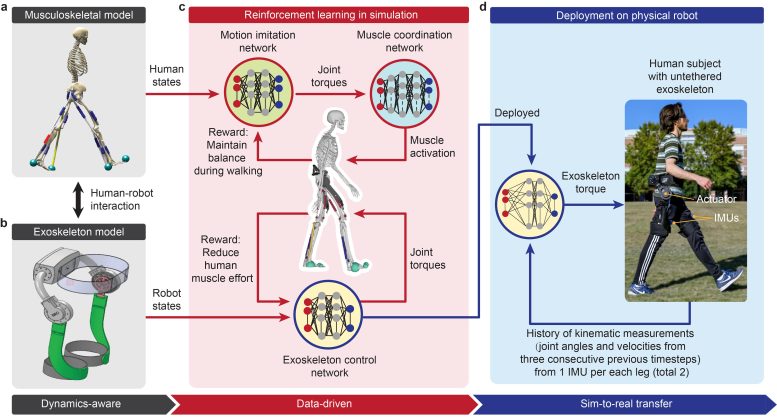
החוקרים פיתחו מודל אנושי שלד-שריר-גוף מלא המורכב מ-208 שרירים (משמאל למעלה), וכן שלד חיצוני מותאם אישית של ירך (שמאל למטה), ולאחר מכן מינפו אינטליגנציה מלאכותית כדי לדמות מספר פעילויות (במרכז) לפני פריסת הבקר המלומד על נושאים אנושיים. אַשׁרַאי: טֶבַעLuo וחב', איור 2.
היכרות עם בקרת בינה מלאכותית
כעת, חוקרים תיארו בקר סופר חכם או "נלמד" הממנף מידע עתיר נתונים בינה מלאכותית (AI) וסימולציות ממוחשבות לאימון שלדים חיצוניים ניידים רובוטיים.
"הבקר החדש הזה מספק סיוע מומנט חלק ורציף להליכה, ריצה או עלייה במדרגות ללא צורך בבדיקות כלשהן המעורבות באדם", דיווח לואו. "עם הרצה אחת בלבד על יחידת עיבוד גרפית, אנחנו יכולים להכשיר חוק בקרה או 'מדיניות' בסימולציה, כך שהבקר יוכל לסייע ביעילות לכל שלוש הפעילויות ולאנשים שונים."
ד"ר Shuzhen Luo מאוניברסיטת Embry-Riddle Aeronautical (מימין), שעבודתה מופיעה ב"טבע" ב-12 ביוני 2024, דנה במחקר שלה הקשור לשלדים רובוטיים רובוטיים המופעלים על ידי בינה מלאכותית, במהלך מצגת פוסטרים פנימית. קרדיט: Embry-Riddle/David Massey
הפחתות אנרגיה מהפכניות
מונע על ידי שלוש רשתות עצביות מרובות-שכבות מחוברות זו לזו, הבקר לומד תוך כדי – מתפתח באמצעות "מיליוני תקופות של הדמיית שרירים ושלד כדי לשפר את הניידות האנושית", הסביר ד"ר לואו, עוזר פרופסור להנדסת מכונות בדייטונה ביץ' של Embry-Riddle, פלורידה, קמפוס.
המסגרת נטולת ניסויים, "למידה בסימולציה", שנפרסה על שלד חיצוני מותאם אישית של ירך, יצרה את מה שנראה כהפחתת קצב חילוף החומרים הגבוהה ביותר של שלדים חיצוניים של ירך ניידים עד כה – עם ממוצעים של 24.3%, 13.1% ו-15.4 % הוצאה אנרגטית מופחתת על ידי לובשים, עבור הליכה, ריצה וטיפוס מדרגות, בהתאמה.
שיעורי הפחתת אנרגיה אלו חושבו על ידי השוואת הביצועים של נבדקים אנושיים גם עם השלד החיצוני הרובוטי וגם בלעדיו, הסביר סו ממדינת NC. "זה אומר שזה מדד אמיתי לכמה אנרגיה חוסך השלד החיצוני", אמר סו, פרופסור חבר להנדסת מכונות וחלל. "עבודה זו בעצם הופכת מדע בדיוני למציאות – מאפשרת לאנשים לשרוף פחות אנרגיה תוך כדי ביצוע מגוון משימות."
גישור על פער הסימולציה למציאות
הגישה היא מאמינים כי היא הראשונה להדגים את ההיתכנות של פיתוח בקרים, בסימולציה, המגשרים על מה שנקרא סימולציה-למציאות, או "פער sim2real" תוך שיפור משמעותי בביצועים האנושיים.
"הישגים קודמים בלמידת חיזוק נטו להתמקד בעיקר בסימולציה ומשחקי לוח", אמר לואו, "בעוד שהצענו שיטה חדשה – כלומר, דרך למידת חיזוק דינמית, מונעת נתונים לאימון ולשלוט ברובוטים לבישים באופן ישיר. להועיל לבני אדם."
המסגרת "עשויה להציע אסטרטגיה הניתנת להכללה וניתנת להרחבה עבור פריסה מהירה ונרחבת של מגוון רובוטים מסייעים עבור אנשים בעלי יכולת וכבדי ניידות כאחד", הוסיפה סו.
התגברות על מכשולים טכנולוגיים
כפי שצוין, שלדים חיצוניים נדרשו באופן מסורתי לחוקי בקרה בעבודת יד המבוססים על בדיקות אנושיות שגוזלות זמן כדי לטפל בכל פעילות ולהתייחס להבדלים בהליכות בודדות, הסבירו חוקרים בכתב העת "טבע". גישת למידה בסימולציה הציעה פתרון אפשרי לאותם מכשולים.
"גישת הלמידה לחיזוק מונעת נתונים מודעת לדינמיקה שנוצרה" מזרזת באופן דרמטי את הפיתוח של שלדים חיצוניים לאימוץ בעולם האמיתי, אמר לואו. הדמיית לולאה סגורה משלבת הן בקר שלד חיצוני והן מודלים של פיזיקה של דינמיקה של שרירים ושלד, אינטראקציה בין אדם לרובוט ותגובות שרירים כדי ליצור נתונים יעילים ומציאותיים. בדרך זו, מדיניות בקרה יכולה להתפתח או ללמוד בסימולציה.
"השיטה שלנו מספקת בסיס לפתרונות מפתח בפיתוח בקרים לרובוטים לבישים", אמר לואו.
כיוונים עתידיים במחקר שלד חיצוני
מחקר עתידי יתמקד בהליכות ייחודיות, להליכה, ריצה או טיפוס במדרגות, כדי לעזור לאנשים עם מוגבלויות כגון שבץ מוחי, דלקת מפרקים ניוונית ושיתוק מוחין, כמו גם לאנשים עם קטיעות.
למידע נוסף על מחקר זה, ראה חליפות רובוטיות המשתמשות בבינה מלאכותית כדי לעזור לך לרוץ קל ומהיר יותר.
ה טֶבַע המאמר נכתב על ידי Shuzhen Luo מאוניברסיטת Embry-Riddle Aeronautical, עם Menghan Jiang, Sainan Zhang, Junxi Zhu, Shuangyue Yu, Israel Dominguez Silva ו-Tian Wang מאוניברסיטת צפון קרוליינה; והמחבר המקביל האו סו מאוניברסיטת צפון קרוליינה סטייט ואוניברסיטת צפון קרולינה בצ'פל היל; אליוט רוז מאוניברסיטת מישיגן, אן ארבור; בולי ג'ואו מאוניברסיטת קליפורניה, לוס אנג'לס; Hyunwoo Yuk מהמכון המתקדם של קוריאה למדע וטכנולוגיה; ו-Xianlian Zhou מה- המכון הטכנולוגי של ניו ג'רזי.
יופנג קווין צ'ן מהמכון הטכנולוגי של מסצ'וסטס סיפק משוב בונה לתמיכה במאמר, "סיוע בשלד חיצוני ללא ניסויים באמצעות למידה בסימולציה."
המחקר נתמך בחלקו על ידי פרס CAREER של הקרן הלאומית למדע (NSF) (CMMI 1944655); המכון הלאומי לחקר מוגבלות, חיים עצמאיים ושיקום (DRRP 90DPGE0019); עמית מצטיין מחקר בשוויץ (SFGE22000372); עתיד העבודה של NSF (2026622); וה המכונים הלאומיים לבריאות (1R01EB035404).
בהתאם למדיניות הפרסום של "טבע", כל "אינטרסים מתחרים" פוטנציאליים נחשפו בעיתון. סו ולואו, חוקר פוסט-דוקטורט לשעבר ב-NC State שנמצא כעת בפקולטה באמברי-רידל, הם ממציאים משותפים בנושא קניין רוחני הקשור לבקר המתואר כאן.