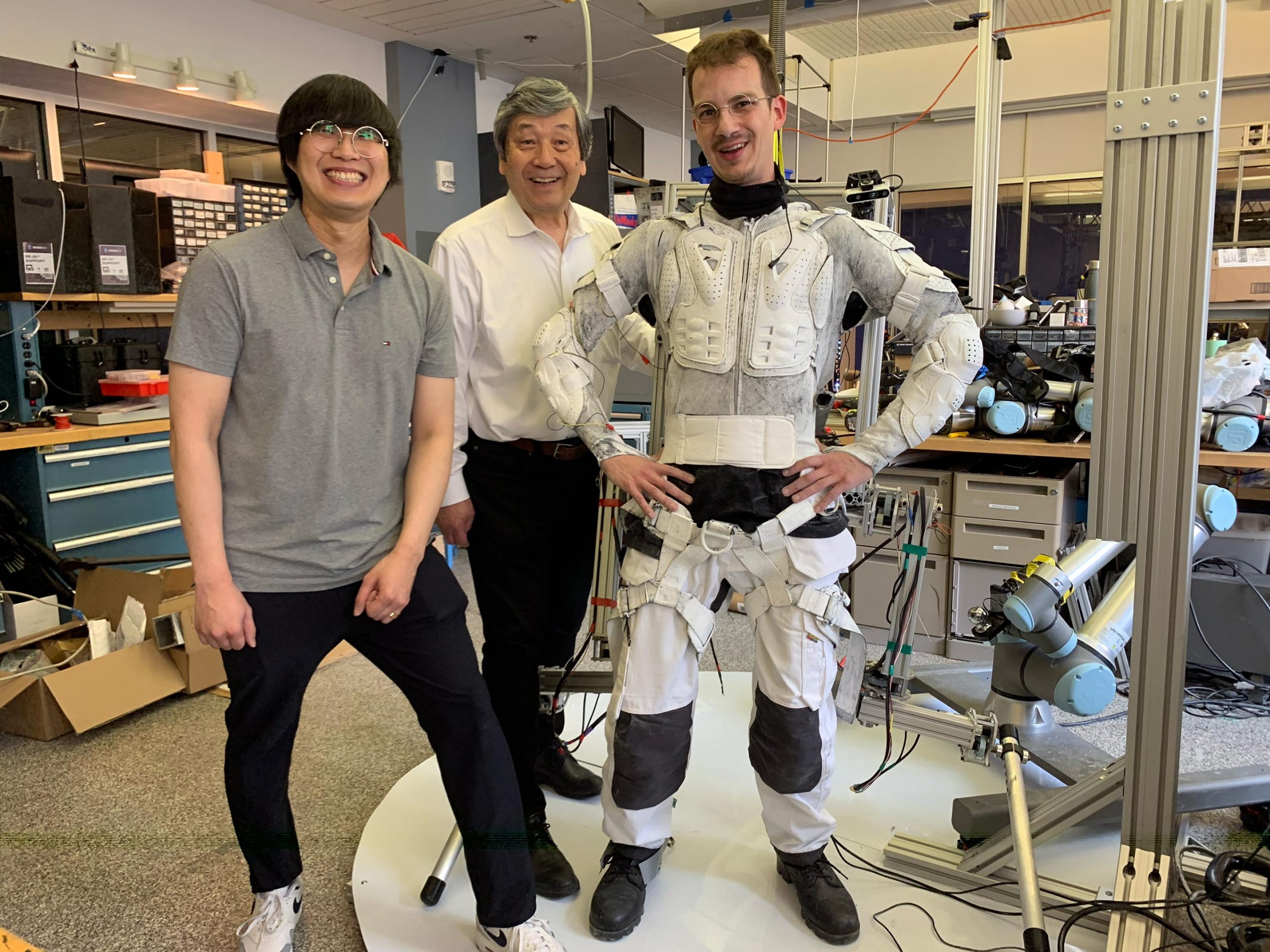
SuperLimbs, מערכת של איברים רובוטיים לבישים שנבנתה על ידי מהנדסי MIT, נועדה לתמוך פיזית באסטרונאוט ולהרים אותם בחזרה על הרגליים לאחר נפילה, ולעזור להם לחסוך באנרגיה למשימות חיוניות אחרות. בתמונה, משמאל, סאנג-יופ לי, הארי אסאדה ואריק באלסטרוס. קרדיטים: ג'ניפר צ'ו
MITפרויקט SuperLimbs של החברה נועד לשפר את ניידות האסטרונאוטים על הירח עם איברים רובוטיים שעוזרים להם לעמוד לאחר נפילות, לשפר את הבטיחות והיעילות למשימות ירח עתידיות.
מחפשים צחוק מהיר? נסה לצפות בסרטונים של אסטרונאוטים נופלים על הירח. התוצאות בהילוך איטי ממשימות אפולו, המראה אסטרונאוטים מועדים ומועדים, ניתנים לקשר משעשע.
תקלות הירח הללו מייצגות גם סיכוי לחדשנות, כפי שציינו מהנדסים ב-MIT.
"אסטרונאוטים מסוגלים פיזית מאוד, אבל הם יכולים להיאבק על הירח, שבו כוח הכבידה הוא שישית מזה של כדור הארץ אבל האינרציה שלהם עדיין זהה. יתר על כן, לבישת חליפת חלל היא נטל משמעותי ויכולה להגביל את תנועותיהם", אומר הארי אסדה. הוא פרופסור להנדסת מכונות ב-MIT. "אנחנו רוצים לספק דרך בטוחה לאסטרונאוטים לחזור על הרגליים אם הם נופלים."
אסאדה ועמיתיו מתכננים זוג איברים רובוטיים לבישים שיכולים לתמוך פיזית באסטרונאוט ולהרים אותם בחזרה על הרגליים לאחר נפילה. המערכת, שאותה כינו החוקרים Supernumerary Robotic Limbs או "SuperLimbs" נועדה להתרחב מתיק גב, שיישא גם את מערכת תומכת החיים של האסטרונאוט, יחד עם הבקר והמנועים להפעלת הגפיים.
סרטון סיכום המחקר.
מדעני MIT בנו אב טיפוס פיזי, כמו גם מערכת בקרה לכיוון הגפיים, בהתבסס על משוב מהאסטרונאוט המשתמש בו. הצוות בדק גרסה ראשונית על נבדקים בריאים שגם התנדבו ללבוש בגד מכווץ בדומה לחליפת חלל של אסטרונאוט. כשהמתנדבים ניסו לקום מישיבה או שכיבה, הם עשו זאת בפחות מאמץ כשהם נעזרו ב-SuperLimbs, בהשוואה לזמן שבו נאלצו להתאושש בעצמם.
צוות המחקר צופה ש-SuperLimbs יכול לסייע פיזית לאסטרונאוטים לאחר נפילה, ובתוך כך לעזור להם לשמור על האנרגיה שלהם למשימות חיוניות אחרות. העיצוב עשוי להיות שימושי במיוחד בשנים הקרובות, עם ההשקה של נאס"אמשימת ארטמיס, שמתכננת לשלוח אסטרונאוטים בחזרה לירח בפעם הראשונה מזה למעלה מ-50 שנה. בניגוד למשימת החקר של אפולו, האסטרונאוטים של ארטמיס ישתדלו לבנות את בסיס הירח הקבוע הראשון – משימה תובענית פיזית שתדרוש מספר פעילויות חוץ-רכבות מורחבות (EVA).
"בתקופת אפולו, כשהאסטרונאוטים היו נופלים, 80 אחוז מהזמן זה היה כשהם עשו חפירה או איזושהי עבודה עם כלי", אומר חבר הצוות והדוקטורנט ב-MIT, אריק בלסטרוס. "משימות ארטמיס יתמקדו באמת בבנייה ובחפירה, כך שהסיכון לנפילה גבוה בהרבה. אנחנו חושבים ש-SuperLimbs יכולים לעזור להם להתאושש כדי שיוכלו להיות פרודוקטיביים יותר ולהרחיב את ה-EVAs שלהם."
Asada, Ballesteros ועמיתיהם יציגו השבוע את העיצוב והלימוד שלהם בכנס הבינלאומי של IEEE לרובוטיקה ואוטומציה (ICRA). מחבריהם המשותפים כוללים את פוסט-דוקטורט של MIT סאנג-יופ לי וקאלינד קרפנטר ממעבדת ההנעה הסילון.
לקחת עמדה
העיצוב של הצוות הוא האפליקציה האחרונה של SuperLimbs, שאסדה פיתחה לראשונה לפני כעשור. מאז הוא התאים אותו למגוון יישומים, כולל סיוע לעובדים בייצור מטוסים, בנייה ובניית ספינות.
לאחרונה, אסאדה ובאלסטרוס תהו האם SuperLimbs עשוי לסייע לאסטרונאוטים, במיוחד כאשר נאס"א מתכננת לשלוח אסטרונאוטים בחזרה אל פני הירח.
"בתקשורת עם נאס"א, למדנו שהנושא הזה של נפילה על הירח הוא סיכון רציני", אומר אסאדה. "הבנו שאנחנו יכולים לעשות כמה שינויים בעיצוב שלנו כדי לעזור לאסטרונאוטים להתאושש מנפילות ולהמשיך בעבודתם".
הצוות הראשון לקח צעד אחורה, כדי לחקור את הדרכים שבהן בני אדם מתאוששים באופן טבעי מנפילה. במחקר החדש שלהם, הם ביקשו מכמה מתנדבים בריאים לנסות לעמוד זקוף לאחר שכיבה על הצד, מלפנים ומאחור.
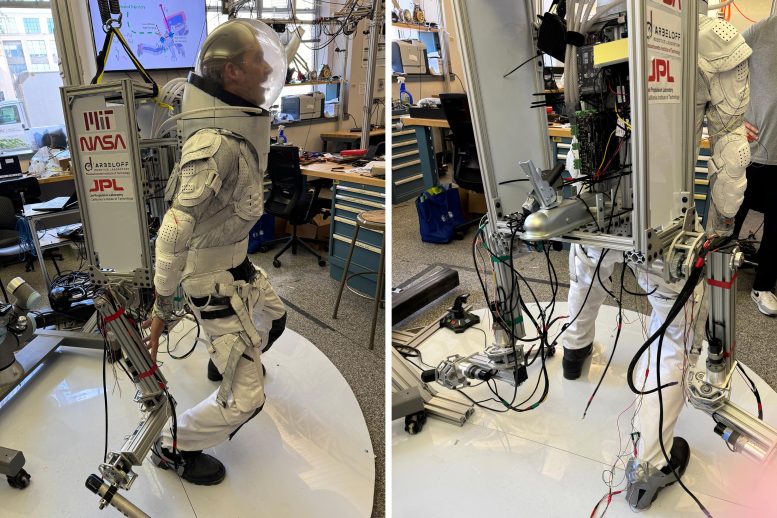
צוות MIT צופה ש-SuperLimbs יכולים לסייע פיזית לאסטרונאוטים לאחר נפילה, ובתוך כך לעזור להם לשמור על האנרגיה שלהם למשימות חיוניות אחרות. "זה מרגיש כמו כוח נוסף שזז איתך", אומר אריק באלסטרוס בתמונה, שגם ניסה את החליפה והזרוע. "תאר לעצמך שאתה לובש תיק גב ומישהו תופס את החלק העליון וסוג של מושך אותך למעלה. עם הזמן זה הופך להיות טבעי". קרדיט: באדיבות החוקרים
לאחר מכן בדקו החוקרים כיצד השתנו ניסיונותיהם של המתנדבים לעמוד כאשר תנועותיהם היו מכווצות, בדומה לאופן שבו תנועות האסטרונאוטים מוגבלות על ידי עיקר חליפות החלל שלהם. הצוות בנה חליפה כדי לחקות את הנוקשות של חליפות החלל המסורתיות, והורה למתנדבים ללבוש את החליפה לפני שניסו שוב לקום מעמדות נפל שונות. רצף התנועות של המתנדבים היה דומה, אם כי דרש הרבה יותר מאמץ בהשוואה לניסיונותיהם הבלתי מאומצים.
הצוות מיפה את התנועות של כל מתנדב בזמן שקם, ומצא שכל אחד מהם ביצע רצף משותף של תנועות, עובר מתנוחה אחת, או "נקודת ציון", לאחרת, בסדר צפוי.
"הניסויים הארגונומיים האלה עזרו לנו להדגים בצורה פשוטה איך אדם עומד", אומר בלסטרוס. "אנחנו יכולים להניח שכ-80 אחוז מהבני אדם עומדים בצורה דומה. אחר כך תכננו בקר סביב המסלול הזה".
יד עוזרת
הצוות פיתח תוכנה ליצירת מסלול עבור רובוט, בעקבות רצף שיעזור לתמוך באדם ולהרים אותו בחזרה על רגליו. הם הניחו את הבקר על זרוע רובוטית כבדה וקבועה, שאותה חיברו לתיק גב גדול. לאחר מכן החוקרים חיברו את התרמיל לחליפה המסורבלת ועזרו למתנדבים לחזור לחליפה. הם ביקשו מהמתנדבים לשכב שוב על הגב, הקדמי או הצד, ולאחר מכן ביקשו מהם לעמוד כשהרובוט חש בתנועותיו של האדם והסתגל כדי לעזור לו לעמוד על רגליהם.
בסך הכל, המתנדבים הצליחו לעמוד ביציבות בהרבה פחות מאמץ כשהם נעזרים ברובוט, בהשוואה לזמן שניסו לעמוד לבד כשהם לבושים בחליפה המסורבלת.
"זה מרגיש כמו כוח נוסף שזז איתך", אומר באלסטרוס, שניסה גם את הסיוע בחליפה ובזרוע. "תאר לעצמך שאתה לובש תיק גב ומישהו תופס את החלק העליון וסוג של מושך אותך למעלה. עם הזמן זה הופך להיות טבעי".
הניסויים אישרו שמערכת הבקרה יכולה לכוון בהצלחה רובוט לעזור לאדם לעמוד בחזרה לאחר נפילה. החוקרים מתכננים לקשר את מערכת הבקרה עם הגרסה האחרונה שלהם של SuperLimbs, הכוללת שתי זרועות רובוטיות מרובות מפרקים שיכולות להימשך החוצה מתרמיל. התרמיל יכיל גם את הסוללה והמנועים של הרובוט, יחד עם מערכת אוורור של אסטרונאוט.
"עיצבנו את הזרועות הרובוטיות האלה על בסיס חיפוש בינה מלאכותית ואופטימיזציה של עיצוב, כדי לחפש עיצובים של מניפולטורים רובוטים קלאסיים עם אילוצים הנדסיים מסוימים", אומר Ballesteros. "סיננו בין עיצובים רבים וחיפשנו את העיצוב שצורך את כמות האנרגיה הנמוכה ביותר כדי להרים אדם למעלה. הגרסה הזו של SuperLimbs היא תוצר של התהליך הזה."
במהלך הקיץ, Ballesteros יבנה את מערכת SuperLimbs המלאה במעבדת הנעה סילון של נאס"א, שם הוא מתכנן לייעל את העיצוב ולמזער את משקל החלקים והמנועים שלה באמצעות חומרים מתקדמים וקלי משקל. לאחר מכן, הוא מקווה לזווג את הגפיים עם חליפות אסטרונאוטים, ולבדוק אותם בסימולטורים בעלי כוח כבידה נמוך, במטרה לעזור מתישהו לאסטרונאוטים במשימות עתידיות לירח מַאְדִים.
"לבישת חליפת חלל יכולה להיות נטל פיזי", מציינת אסאדה. "מערכות רובוטיות יכולות לעזור להקל על הנטל הזה ולעזור לאסטרונאוטים להיות פרודוקטיביים יותר במהלך המשימות שלהם."
מחקר זה נתמך, בחלקו, על ידי נאס"א.